 |
Данный раздел запрещён для просмотра детьмиМатериалы данного раздела могут содержать информацию, запрещенную для детей, согласно нормам установленным Федеральным законом "О защите детей от информации, причиняющей вред их здоровью и развитию". |
Гражданская радиосвязь /
Всё на форуме /
Аппаратура самодельная - показываем, обсуждаем, восхищаемся
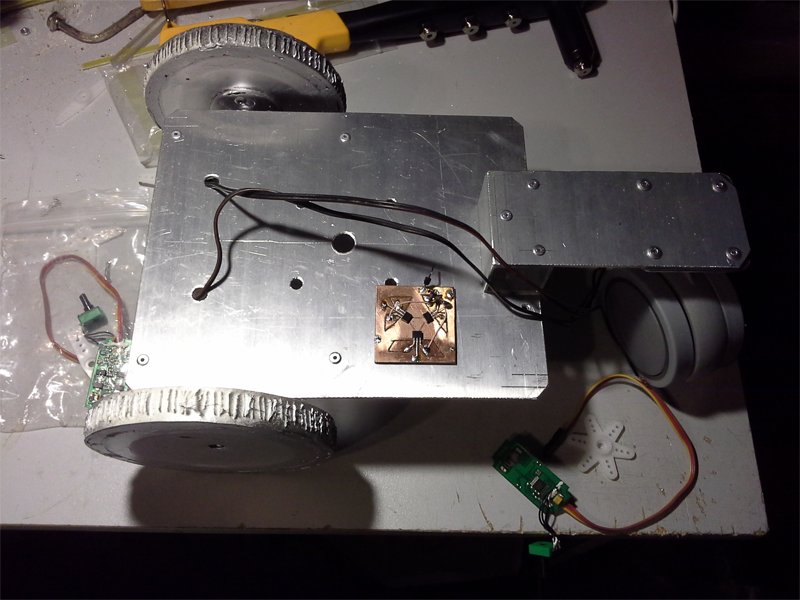
Создание робота (комнатный робот своими руками в домашних условиях) с управлением на микроконтроллере
|



|
Бросить друзьям ссылку на тему:
Если это интересная тема, дайте людям на неё ссылку:
http://27kb.ru/zou.php?f=901&message=20470
|